
 产品:37
产品:37

一种机器人地轨装置
技术领域
本实用新型涉及机器人技术领域,更具体的说是涉及一种机器人地轨装置。
背景技术
随着社会的进步,自动化设备逐渐代替了传统的手工劳动,不断地提高了生产效
率,降低了生产成本。现有的各行各业中都采用机器换人,但是目前大多数的自动化设备都
是柜式的、或者生产线、流水线的工作形式,目前比较常见的是一种自动化生产线上具有有
各个工位,产品经过流水线移动,到达不同的工位后通过机械手进行加工,然后进入下一个
工位,这种生产方式是目前常见的。
但是针对于一些汽车行业、电子商务和零售物流、电子行业、能源行业、金属加工
等行业,不仅仅是针对局域型的流水线,更有的是针对大面积的空间甚至整个厂房的自动
化搬运和加工。如物流线,现有的都是通过人工搬运的方式,从大货仓内挑选货物,若需要
通过自动化、智能化的方式,则需要在地面上铺设地轨,机械手或者机器人安装与地轨上进
行移动,本发明则是针对该地轨进行研发;再有,现有技术中的地轨驱动部件之间是需要添
加润滑油的,通过润滑油减少摩擦,进而降低损耗,而现有技术中的地轨尚未具有自动加油系统。
实用新型内容
有鉴于此,本实用新型提供了一种机器人地轨装置。
为了实现上述目的,本实用新型采用如下技术方案:一种机器人地轨装置,包括:
地轨装置,设置于平面上,具有支架、安装于支架上的导轨,机械手,安装于地轨装置上并沿
导轨往复移动;驱动装置,包括:安装于导轨上的滑板以及驱动组件,所述机械手安装于滑
板上;所述驱动组件包括:固定安装支架上并沿导轨长度方向分布的齿条,安装于滑板上的
电机以及连接于电机输出轴的齿轮,齿轮与齿条啮合,通过啮合传动驱动滑板沿导轨移动;
还包括:一润滑系统,所述润滑系统包括:安装于滑板上的加油箱以及油阀,加油箱的出油
口通过油管连接于油阀,油阀的出口通过油管连接于齿轮,加油箱通过油阀控制出油量;加
油箱通过油管向齿轮加入润滑油。
优选的技术方案中,所述的电机通过电机支架安装于滑板上,电机支架或滑板的
底面对应于齿轮处设置有油管支架。
优选的技术方案中,所述的油管支架包括:支撑板以及安装于支撑板上的油块,油
块与齿轮相对应的一面弧形设置,油块的另一侧设置有进油孔;弧形面上设有出油槽,出油
槽与进油孔连通;所述的油管连接于进油孔。
优选的技术方案中,所述的滑板上设置有用于静止时插入支架上的定位销。
优选的技术方案中,所述的导轨成组对称设置安装于支架上;所述的滑板通过滑块安装于导轨。
优选的技术方案中,所述的支架上竖直设置有安装底座,于支架表面设置有防尘
板,安装底座用于支撑防尘板;安装底座的端面上设置有用于定位销插入的定位孔内。
优选的技术方案中,所述的定位销插入于安装底座的插孔内。
经由上述的技术方案可知,与现有技术相比,本实用新型的地轨装置上设置有润
滑系统,能够有效地智能化地在地轨装置使用的过程中定时、定量的添加润滑油,减少摩
擦,保证移动的顺畅;并且在地轨装置上设置有定位销,能够便于在机械手需要维修或者保
养时,将机械手很好的定位并且不会由于维修时产生的外力而随导轨移动,保证安全。
附图说明
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例
或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅
是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还
可以根据提供的附图获得其他的附图。
图1为本实用新型的立体结构图;
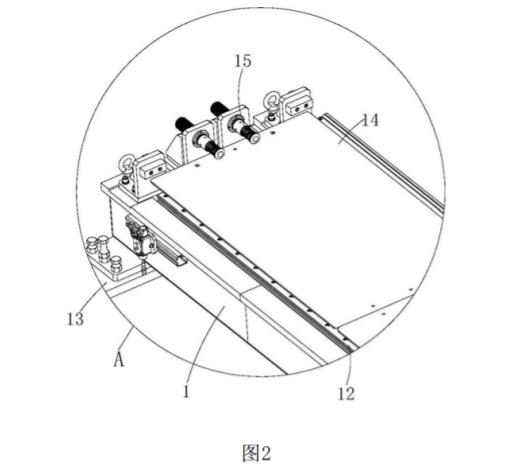
图2为图1中A处的局部放大图;
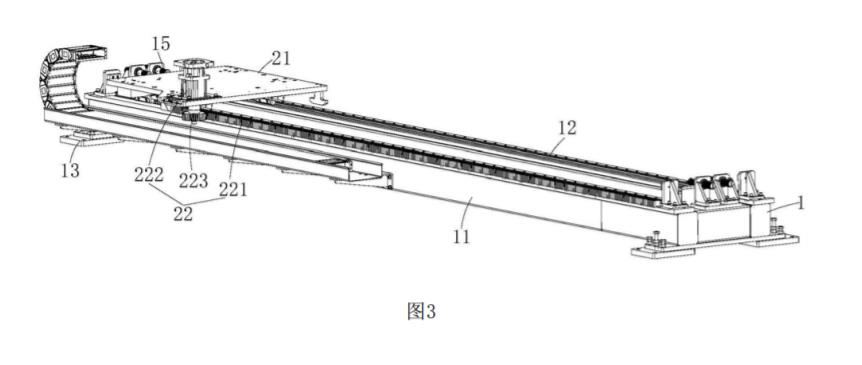
图3为本实用新型中地轨装置的立体结构图;
图4为本实用新型的局部立体结构图1;
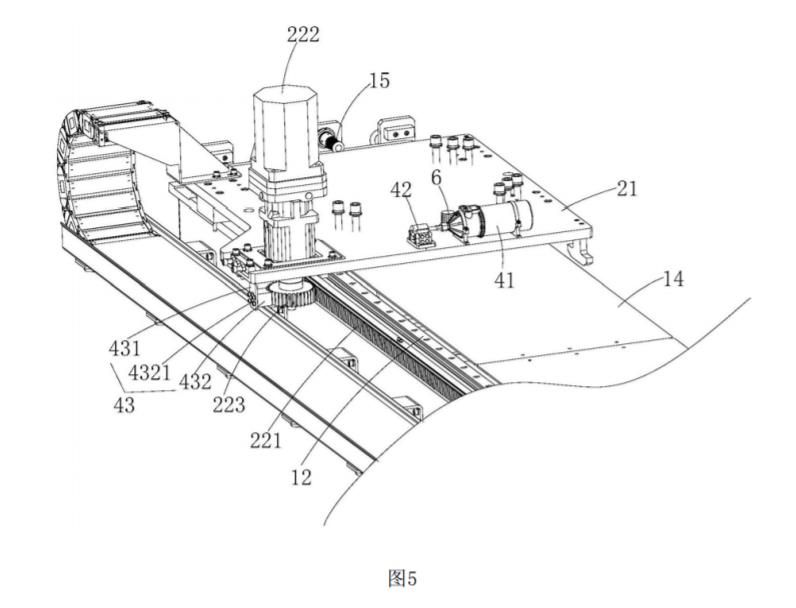
图5为本实用新型的局部立体结构图2;
图6为本实用新型的局部分解图。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下
所获得的所有其他实施例,都属于本实用新型保护的范围。
一种机器人地轨装置,见图1所示,包括:地轨装置1以及机械手3,机械手3是安装
于地轨装置1上,并且通过一个驱动装置2驱动沿地轨装置1往复移动。
如图3-4所示,所述的地轨装置1设置于平面上,包括:支架11、安装于支架11上的
导轨12和安装底座13,安装底座13设置有多个,并且沿支架11的长度分布,支架11为矩形的
金属框架,支架11支撑于安装底座13上,并且安装底座13上形成有穿入金属框架中的安装
板131,防尘板14支撑于安装板131上;导轨12对称设置,并且支撑于支架11的上端面;机械
手3是通过滑板21安装于导轨12上,滑板10底部设置有滑块,滑板21通过滑块沿导轨12往复移动。
所述的驱动装置2包括:所述的滑板21以及驱动组件22,驱动组件22包括:固定安
装于支架11上并沿导轨12长度方向分布的齿条221,安装于滑板21上的电机222以及连接于
电机222输出轴的齿轮223。电机222安装于滑板21的表面,且电机222的输出轴穿过滑板21
向下伸出,而齿轮223安装于输出轴并位于滑板21的下方,齿轮223是与齿条221啮合;当电
机222启动时带动齿轮223转动,实现啮合传动。电机222可以实现正反转动,带动齿轮223正
反转动,从而实现滑板21沿导轨12往复移动,而机械手3是安装于滑板21上的,那么可以实
现机械手3沿地轨装置1的往复移动。
如图4-6所示,在驱动装置2上设置有润滑系统4,润滑系统4包括:安装于滑板21上
的加油箱41以及油阀42,加油箱41的出油口通过油管连接于油阀42,油阀42的出口通过油
管连接于齿轮223。使用时,是通过油阀42控制抽取加油箱41内的润滑油,通过油阀42使加
油箱41持续或者间歇地供油,具体是可以通过外部的控制系统调节的。
所述的电机222通过电机支架安装于滑板21上,电机支架或滑板21的底面对应于
齿轮223处设置有油管支架43,这里设定为安装于滑板21底部。油管支架43包括:支撑板431
以及安装于支撑板431上的油块432,支撑板431的上端通过螺钉锁定于滑板21底部,油块
432通过螺钉锁紧于支撑板431下方,油块432的一个侧面弧形设置,该弧形面对应于齿轮
223,便于向齿轮223加油,而油块432上设置有进油孔4321,弧形面上设置有出油槽4322,出
油槽4322与进油孔4321连通,出油槽4322竖直设置,在转动时,通过出油槽4322向齿轮432加油。
图4-6中油管尚未画出,但油管是一种现有技术中常用的结构,为透明胶管,通过
接头分别连接于进油孔4321以及油阀42;而为了避免油块432的弧形面与齿轮223之间产生
摩擦,可以在出油槽4322内安装油刷,油刷的刷毛伸出出油槽4322,这样便于向齿轮223加
油,而在齿轮223与齿条221之间啮合传动的过程中,将润滑油带到齿条221,完成驱动装置2
的加油润滑。
机械手3是安装于滑板21上,但机械手3在运行一段时间后,有可能出现故障需要
维修或者需要保养的情况,那么需要将机械手3固定于地轨装置1上,不会由于维修时外力
的情况下推动滑板21移动。
因此,在滑板21上设置有定位销5滑板21、防尘板14以及安装板131上对应开设有
用于定位销6插入的插孔60,这样,在进行维修保养时,将定位销6插入插孔60定位,不会由
于外力而使滑板21移动。
机械手3是安装于地轨装置1上,通过滑板21安装,机械手的具体结构是不做限制
的,地轨装置1可以与各种不同类型的机械手3组装,而本实施例中机械手3为四周机械手,
具有转动轴31、第二摆动轴32、第三摆动轴33以及第四旋转轴34,能够完成机械手3的智能化动作。
滑板21是带动机械手3沿导轨12移动,而与支架11的两则设置有缓冲件15,该缓冲
件15为顶柱以及设置于顶柱上的缓冲弹簧,并且于支架11的两则设置有行程传感器,该行
程传感器是用于当感应到滑板21的到来,驱动电机222反向转动,使滑板21反向移动,此种
行程传感器技术属于一种现有技术,这里不做详细说明;当滑板21到来时,会与顶柱相触
碰,而缓冲弹簧则能够起来良好的缓冲作用,防止硬性触碰。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新
型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定
义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因
此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理
和新颖特点相一致的宽的范围。



- 下一篇:暂无
- 上一篇:一种用于自动化焊接的机器人工作站